Stereo cameras
Stereo cameras for long-range 3D recognition and mapping
 V-DOC
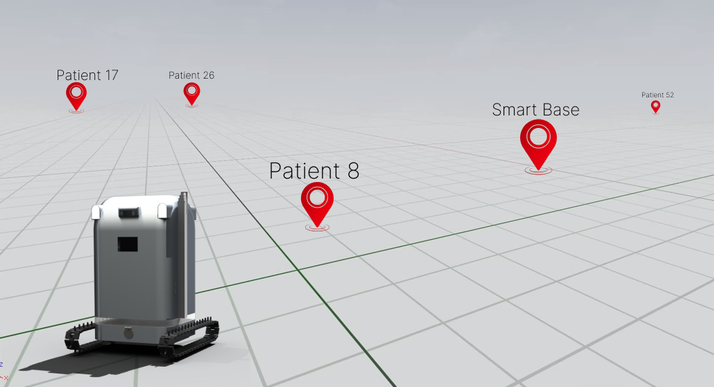
V-DOCAutonomous navigation
B.A.R.M's navigation combines cameras, LIDAR, IMU, mapping, path detection, and obstacle avoidance so the robot can move through hospitals, mapped spaces, and rural routes in the original concept.
Stereo cameras for long-range 3D recognition and mapping
2D LIDAR for real-time 360-degree obstacle detection
HD color cameras for path recognition and backup perception
3D LIDAR or time-of-flight cameras for low-light and fine field-of-view mapping
IMU for relative orientation and movement inside hospitals or mapped environments
RTK GNSS and marked-road approaches for rural movement in the original B.A.R.M concept
Mapping
The old navigation page described Cartesian mapping, road or tape mapping, GNSS/RTK support, and route optimization for B.A.R.M. In hospitals, the newer pitch direction emphasizes indoor maps, obstacle avoidance, IMU-based localization, and integration with building systems such as elevators where supported.